Le cours de Microinformatique impose la réalisation d’un miniporjet à implémenter sur le robot E-puck 2.0. Le cahier des charges demande de mettre en place un programme libre, qui utilise au minium les moteurs ainsi que quelques capteurs du robot. Ce projet s’effectue par groupe de deux étudiants.
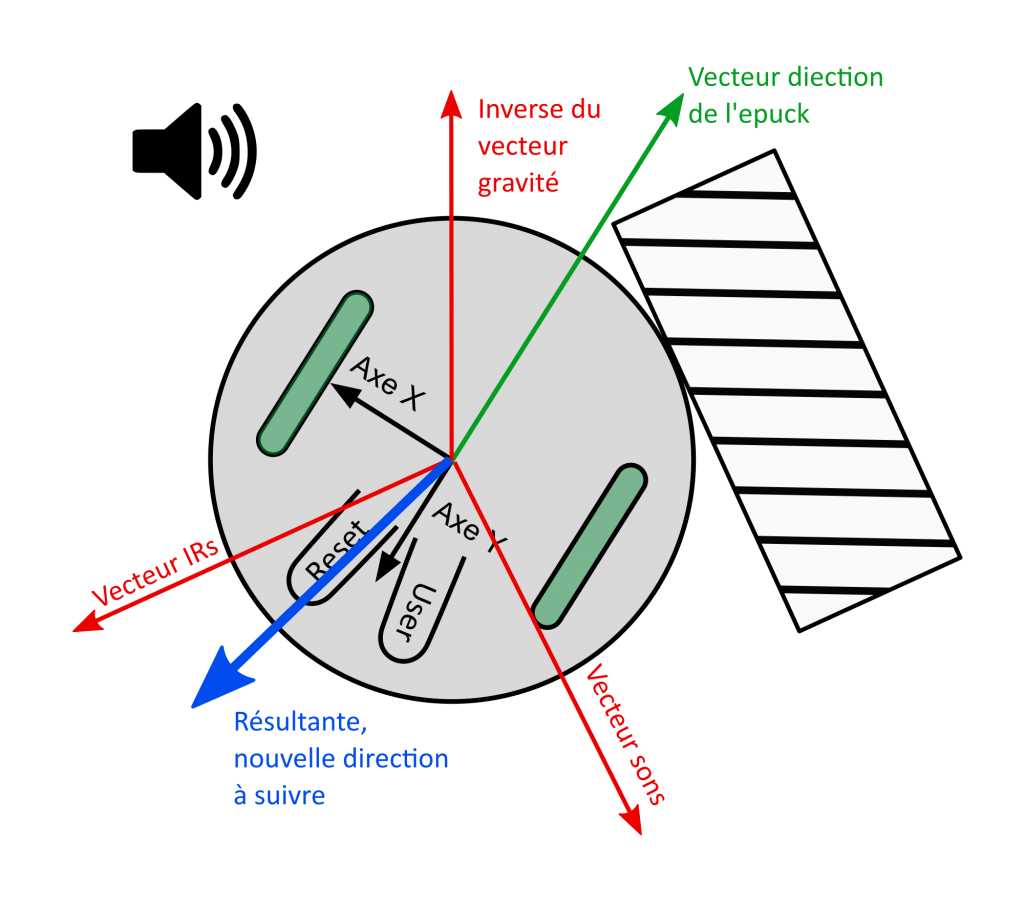
Notre projet visait à faire bouger le robot en simulant les mouvements d’une bulle d’air dans un liquide. Le robot est placé sur un plan incliné, qu’il remonte en évitant les obstacles sur sa route. De plus, le robot doit être capable de réagir à un son, en calculer la provenance et s’en éloigner. Un peu comme un courant qui viendrait dévier la bulle d’air dans sa course.
Voici les documents disponibles relatifs à ce projet: